
VaMEx-VTB

VaMEx-VTB is a sub-project of the project line VaMEx funded by DLR (Deutsches Zentrum für Luft- und Raumfahrt/German Aerospace Centre) and VaMEx-VTB sub-project is developed by the University of Bremen (Computer Graphics and Virtual Reality Research Lab (CGVR)). Other VaMEx project partners include TU Braunschweig IfF (Institut für Fahrzeugtechnik), Bundeswehr University Munich ISTA (Institute of Space Technology and Space Applications), DLR Institut KN (The Institute of Communications and Navigation), RIC DFKI (The Robotics Innovation Center), TUM Lehrstuhl für Medientechnik (TUM Chair of Media Technology), Uni Würzburg, Inst. für IT für Luft- und Raumfahrt (Modern aerospace systems Instiute), DFKI GmbH (The German Research Center for Artificial Intelligence), TUM Lehrstuhl für Flugsystemdynamik (Institute of Flight System Dynamics), TUM Lehrstuhl für Kommunikation und Navigation (Institute for Communications and Navigation), NavVis GmbH and ANavS GmbH (Advanced Navigation Solutions).
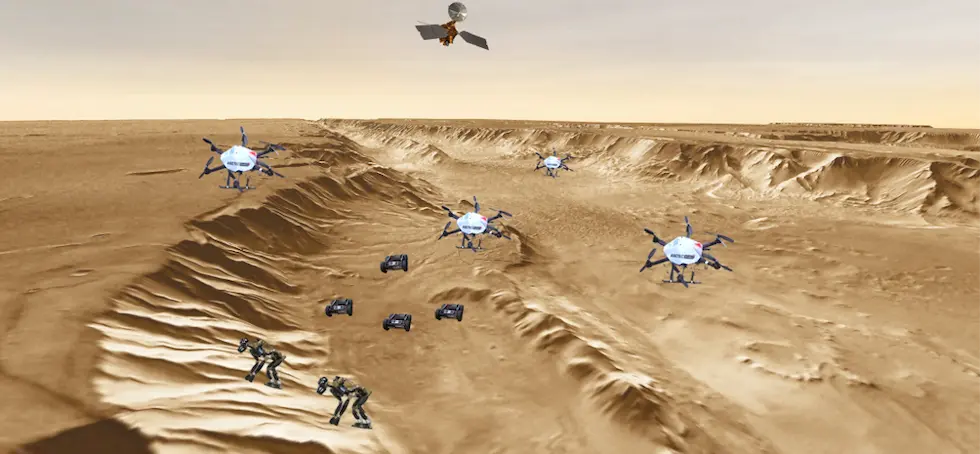
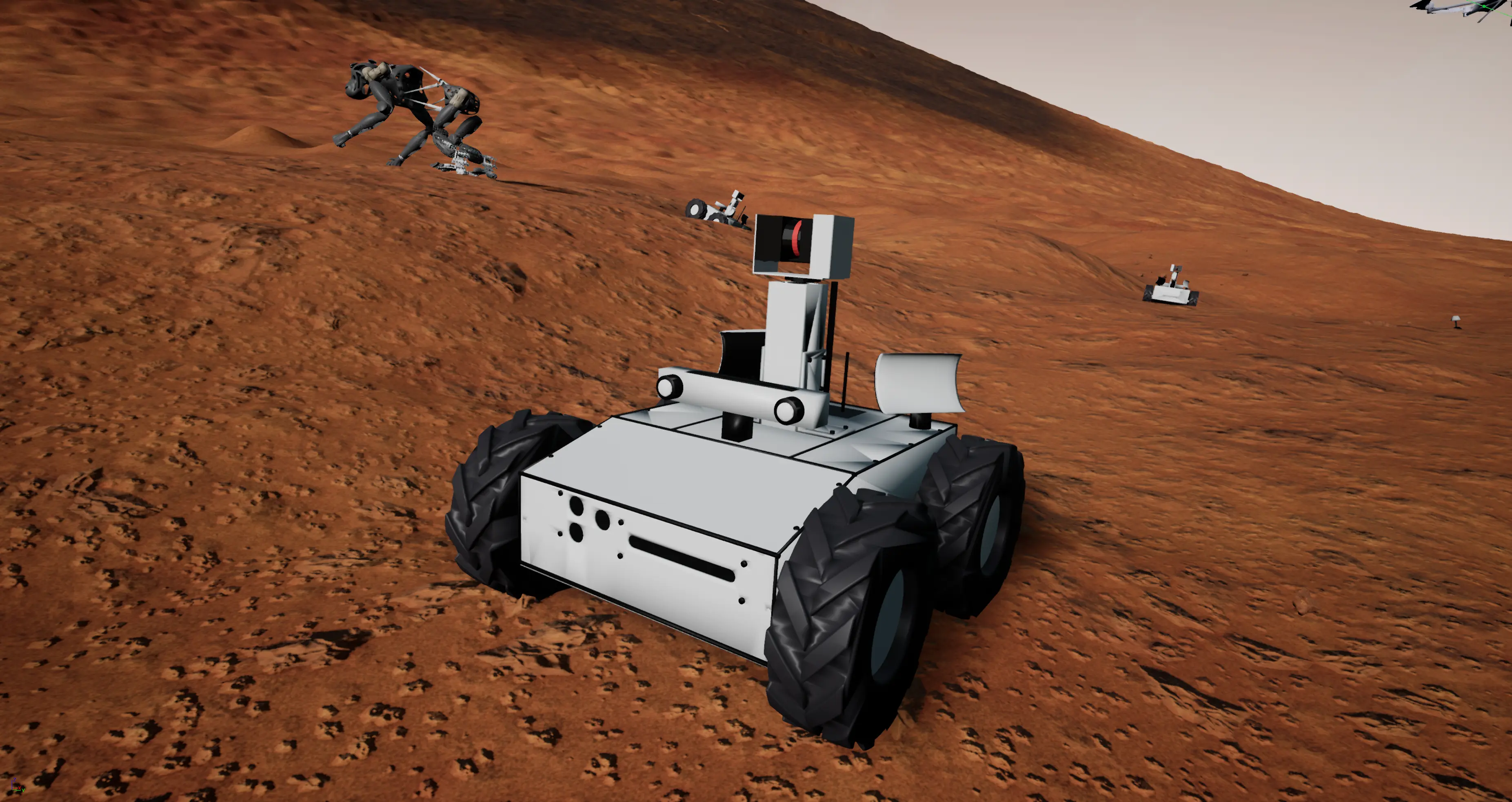
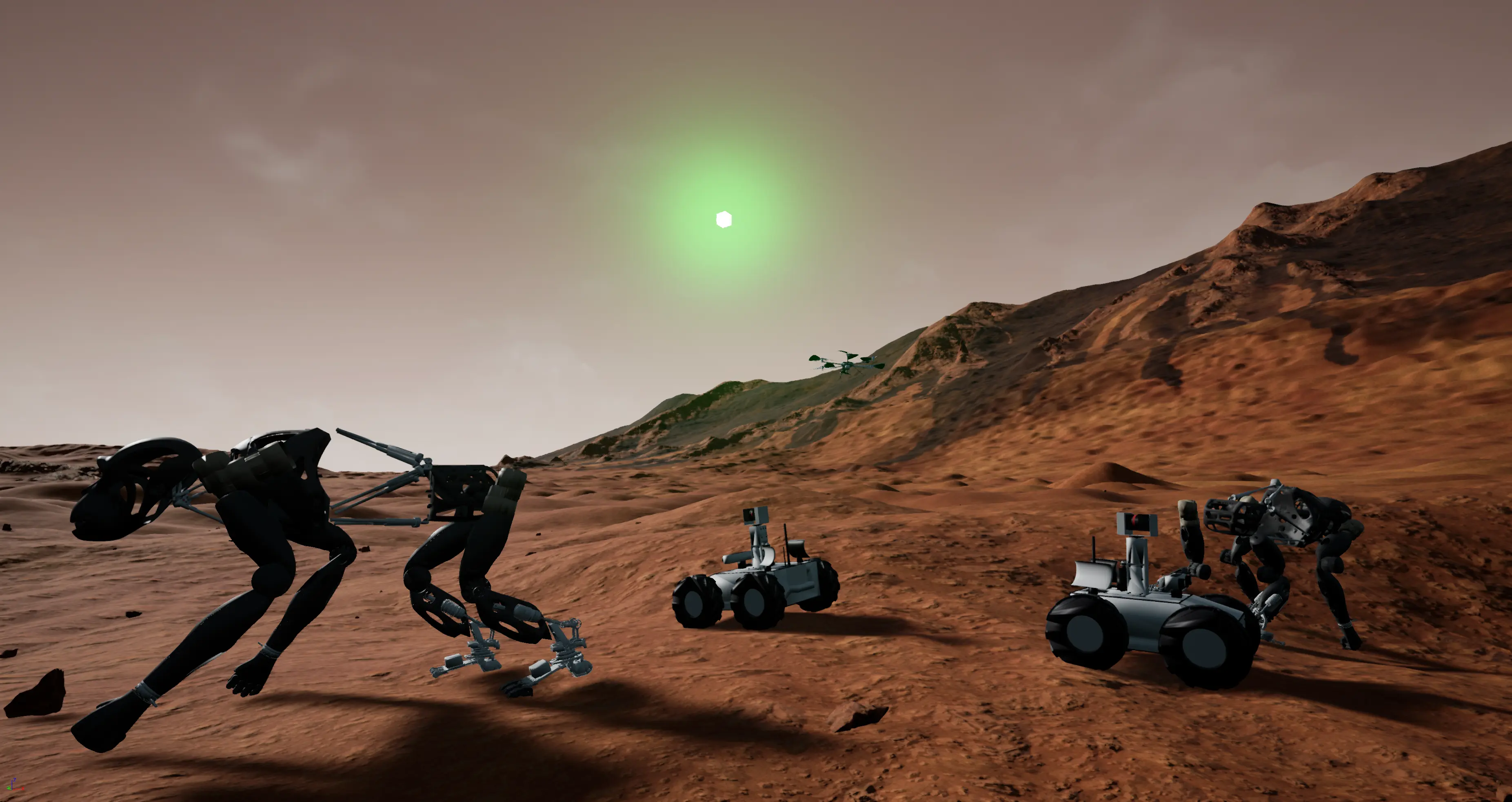
VaMEx project line is an initiative for the development of concepts, algorithms, and hardware for a swarm-based exploration of the Valles Marineris on the planet Mars. The swarm comprises different elements such as rovers, UAVs (Unmanned Aerial Vehicles (drones)) and hominid robots (called as Charlie). The idea is to have an autonomous swarm navigation and exploration system which communicate with each other. Real physical tests for the validation and verification of such complex autonomous navigation and exploration systems are time-consuming, expensive and difficult due to the requirement of implementation of advanced hardware and to find or build a suitable environment for the validation. Therefore, testing in a virtual environment and framework overcomes all of the above shortcomings and provides several other benefits. VaMEx-VTB is one such platform which provides a simulation framework for testing the swarm behavior on the Mars terrain.
 |
The project comprises two major goals:
- To provide a VTB framework to test swarm behaviour and navigation under different enironmental scenes and scenarios.
- To provide tools within the VTB for analyses and evaluation of performance of different concepts, algorithms and scenarios.
Environment
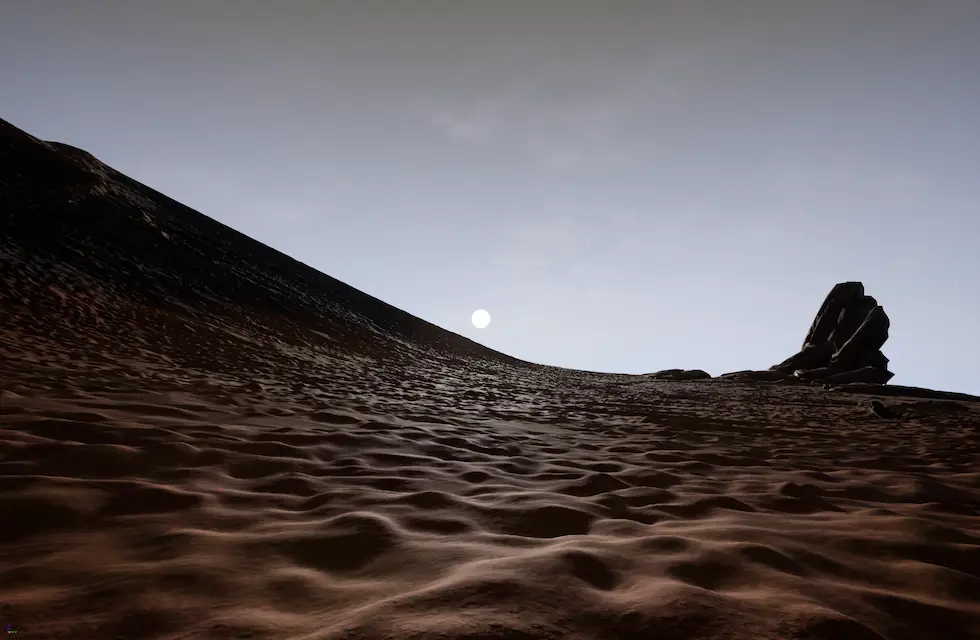
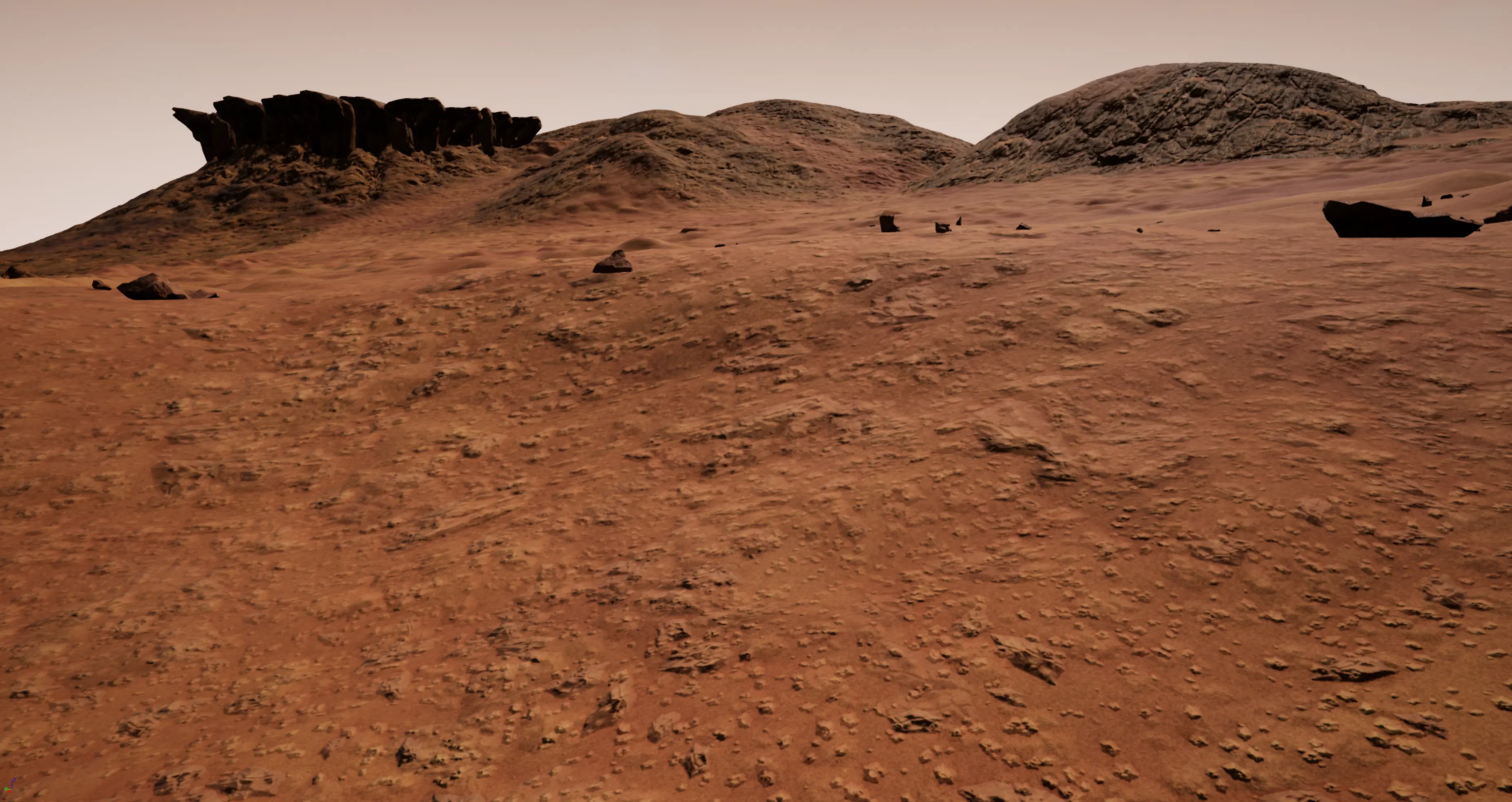
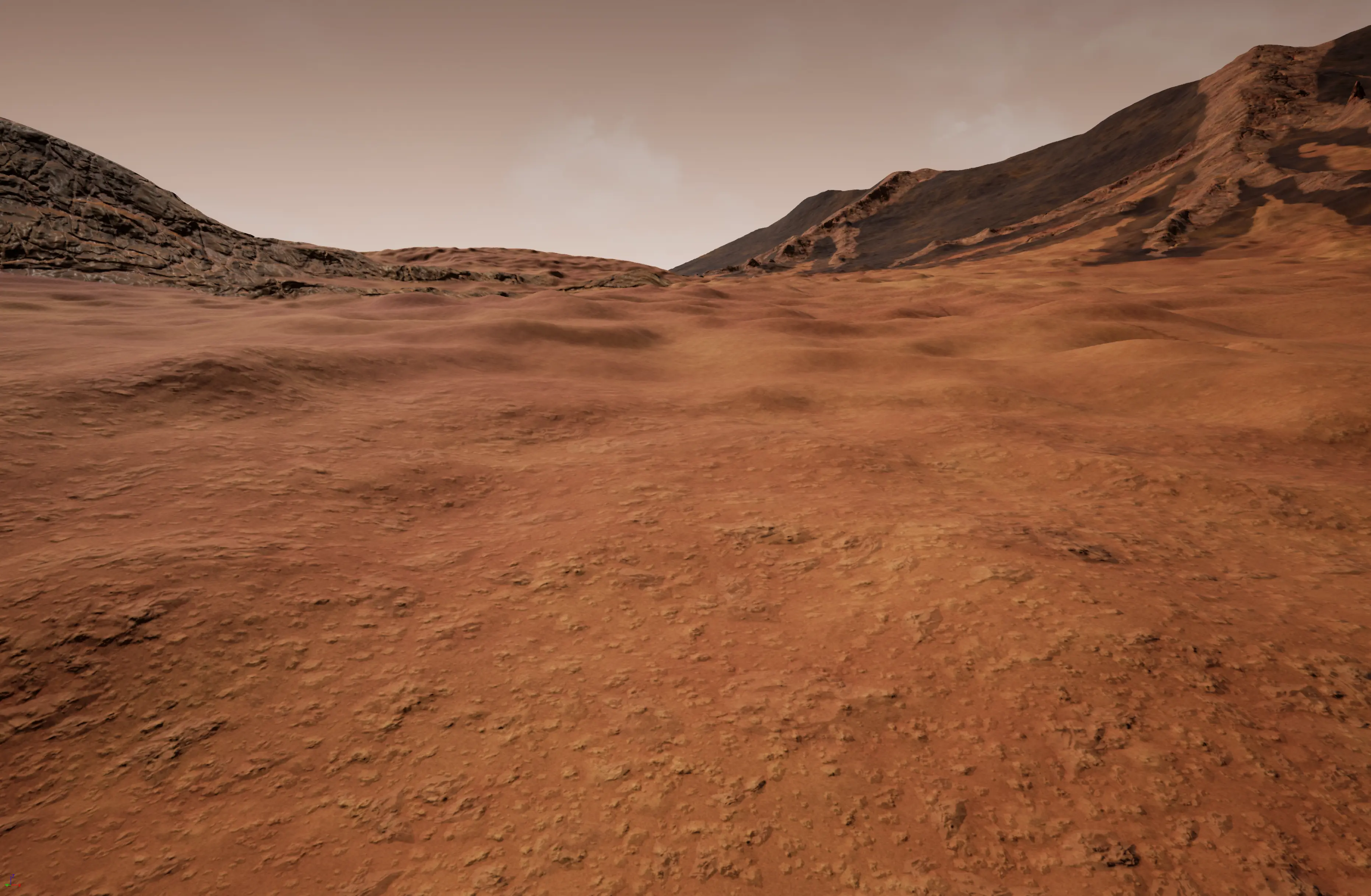
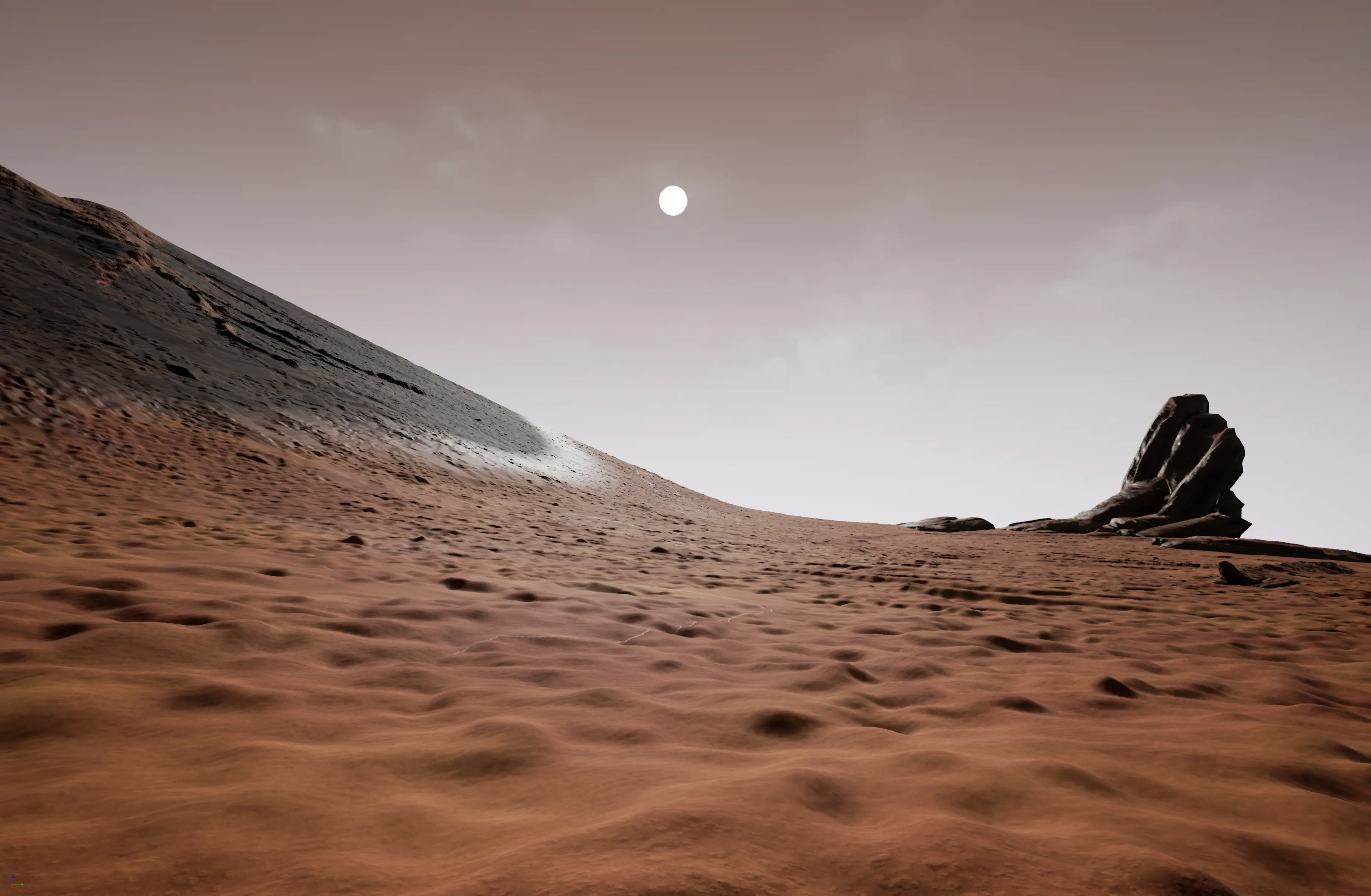
- Realistic Mars terrain from DTM obtained by HiRise.
- Terrain type (sandy, rocky, etc.) can be painted on terrain.
- Different texturing and physics depending on terrain type.
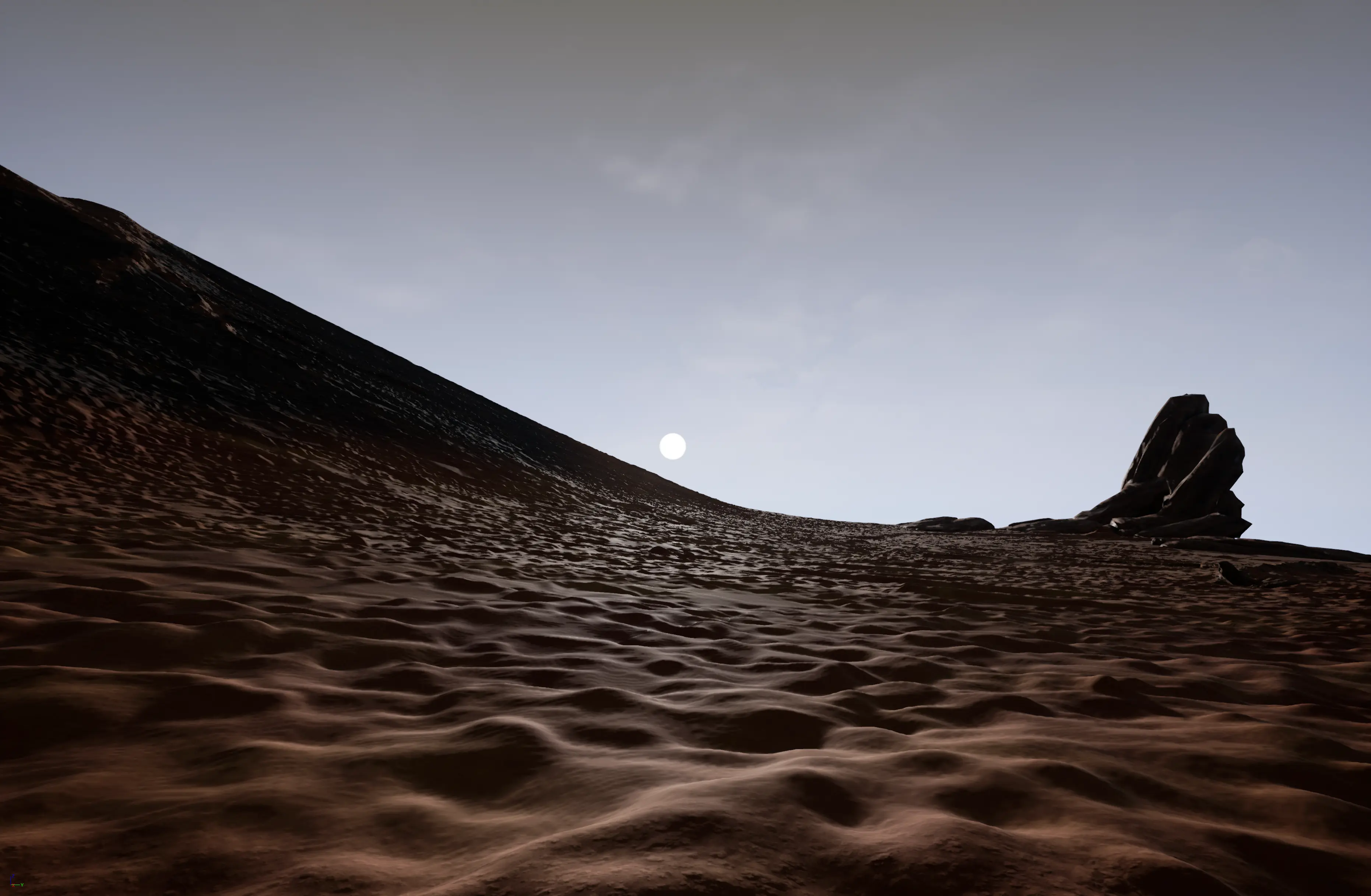
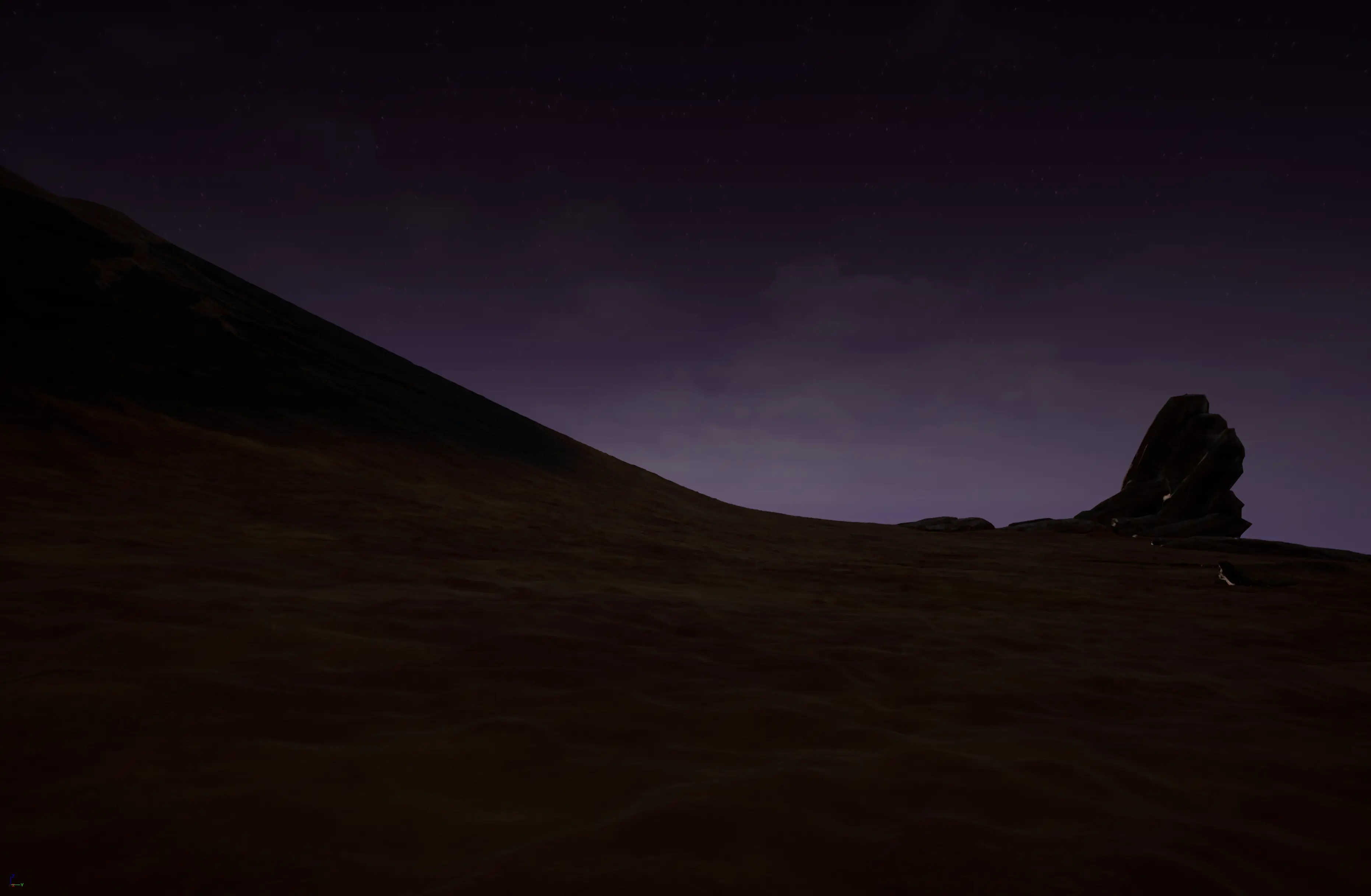
- Realistic sky with day-night-cycle.
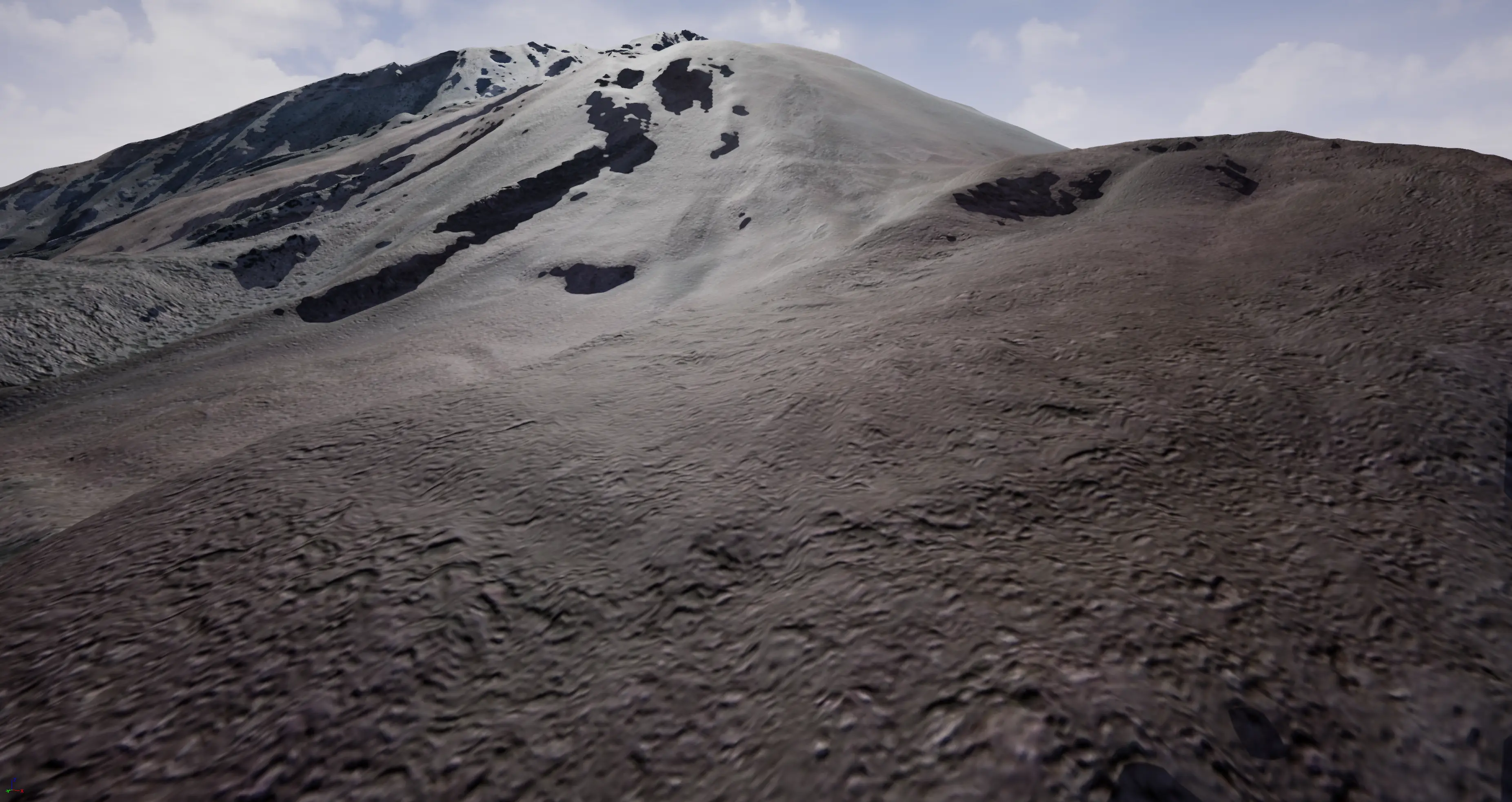
- Other environments with terrain:
- Canary islands.
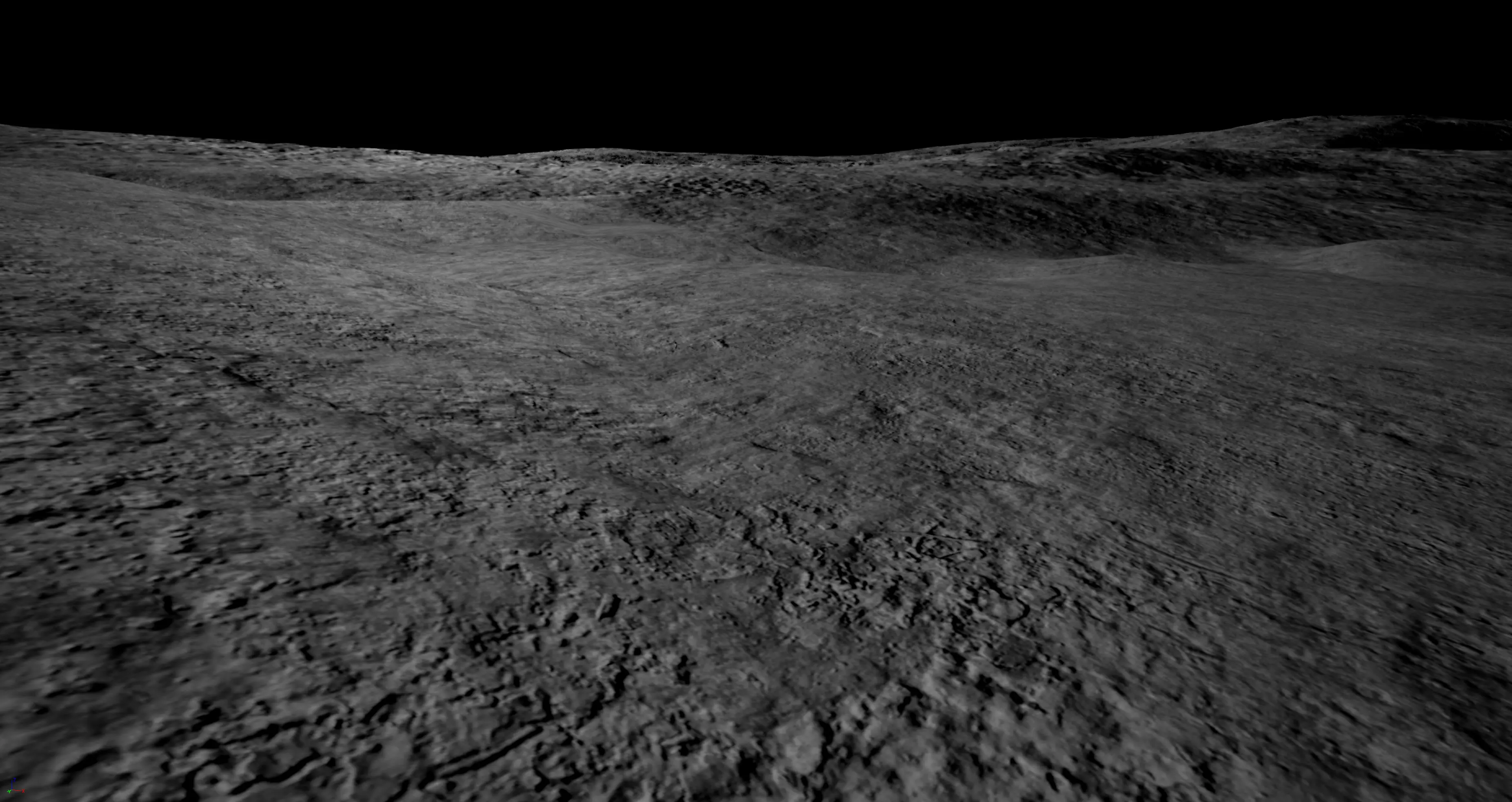
- The Moon.

Section of Mars HiRise terrain with textures, foilage (rocks) and other features.

Section of Mars HiRise terrain with textures, foilage (rocks) and other features.

One of the Mars rock texture.

One of the Mars ground texture.

Terrain of section of Tenerife island (belongs to Canary islands).
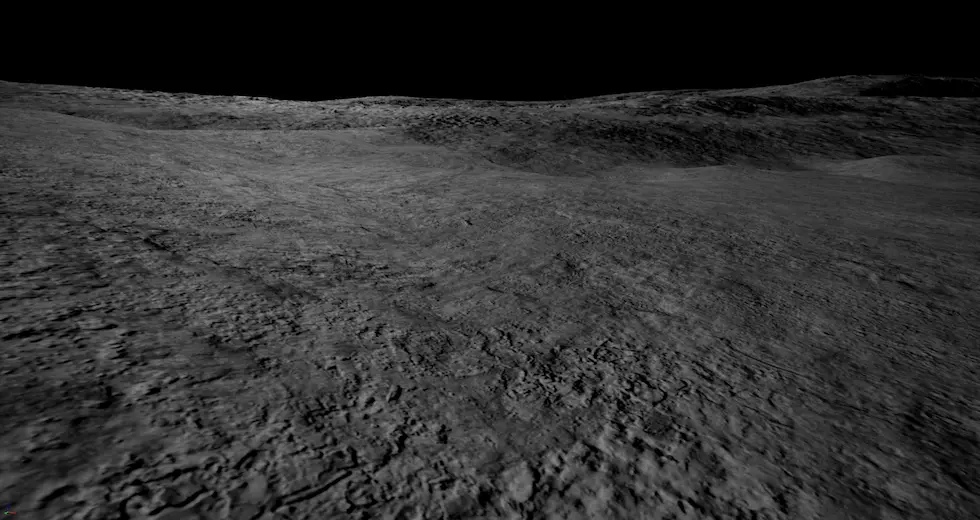
Terrain of section of Moon.


Day and night cycle.
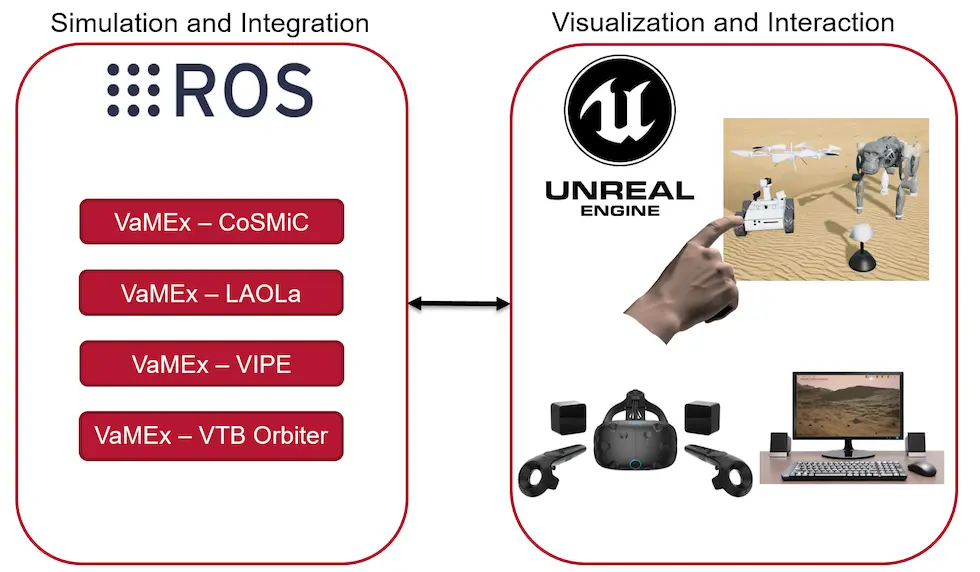
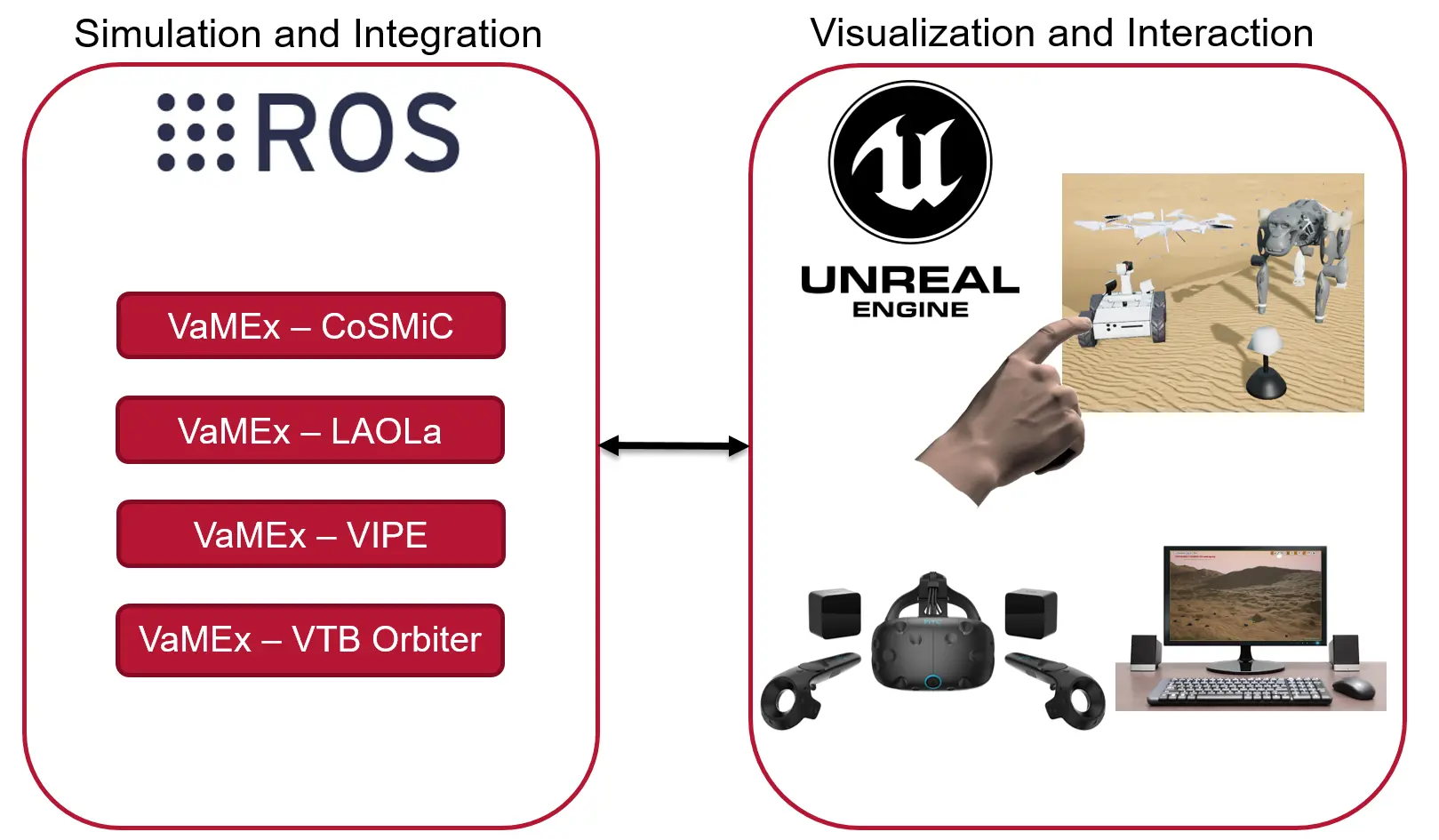
Communication Framework between ROS and Unreal
- The simulation of environmental aspects, synthesis of data for various sensors, visualization of data and user interaction are implemented using Unreal.
- Autnomous navigation, exploration systems, sensor data processing, error models and swarm behaviour of various swarm units are implemented using different ROS nodes.
- Unreal project can connect to a running ROS-bridge server, which is running on a linux virtual machine.
- Unreal project can receive from and publish to topics on the ROS side.
- Error models for IMU and Lidar data (from TU Braunschweig) are applied in real-time.
- General components for swarm units:
- Sending odometry to ROS.
- Sending images obtained by RGB(D)-Cameras to ROS.
- Sending lidar range data to ROS.
- Range data is converted into point-clouds in ROS
- Receiving waypoints from the exploration manager (DLR IKN)
- Synthesizing Lidar data and sending it to ROS
- Uncertainty visualization as an ellipsoid based on covariance matrices
High level architecture of overall VTB software framework.
-
Simulation System
- Arbitrary number of UGVs, UAVs, and Charlies can be spawned.
- Swarm units spawn in a circle
- Publishes current simulation time to ROS.
- Basic time warping: the passing of time can be accelerated to up to 4096x.
- Arbitrary number of UGVs, UAVs, and Charlies can be spawned.
-
LAOLa
- A pre-defined number of LAOLa-beacons can be dropped around the landing zone
- Matrix with line-of-sight information is published to ROS
- List of calculated Poses is received from ROS
-
Unmanned Ground Vehicles (UGV) Modelling
- Realistic 3D model with rotating wheels and rotars.
- Movement is calculated physics based
- Paths/splines to a given target point can be calculated.
- UAVs can follow the paths/splines.
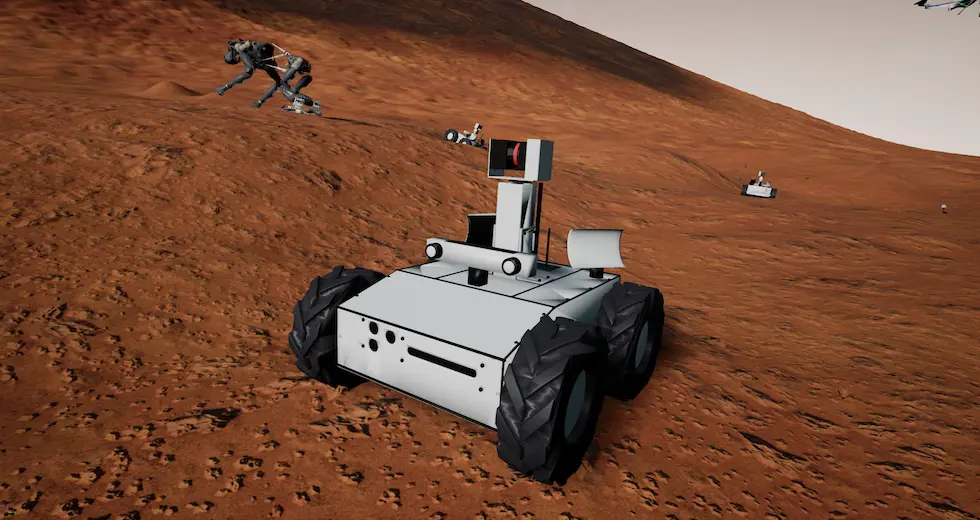
UGV (Unmanned ground vehicle) 3D model.
-
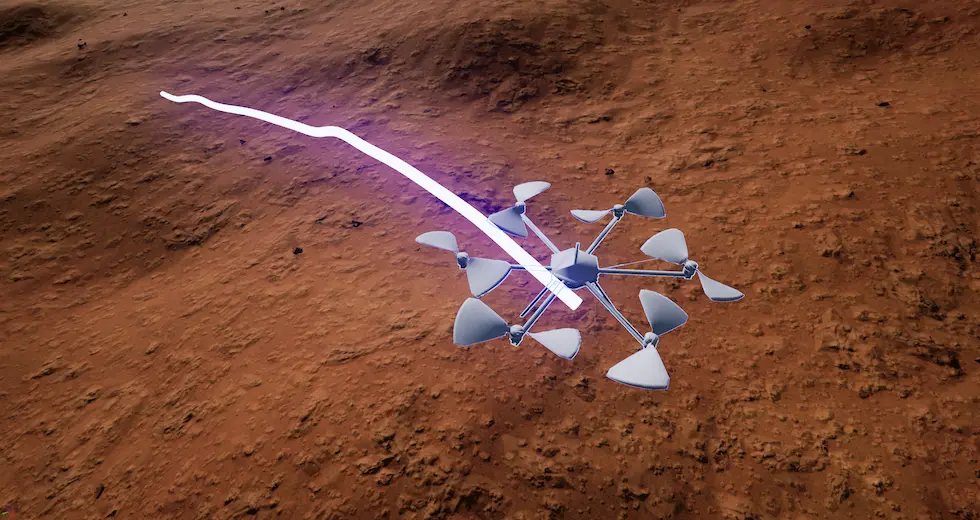
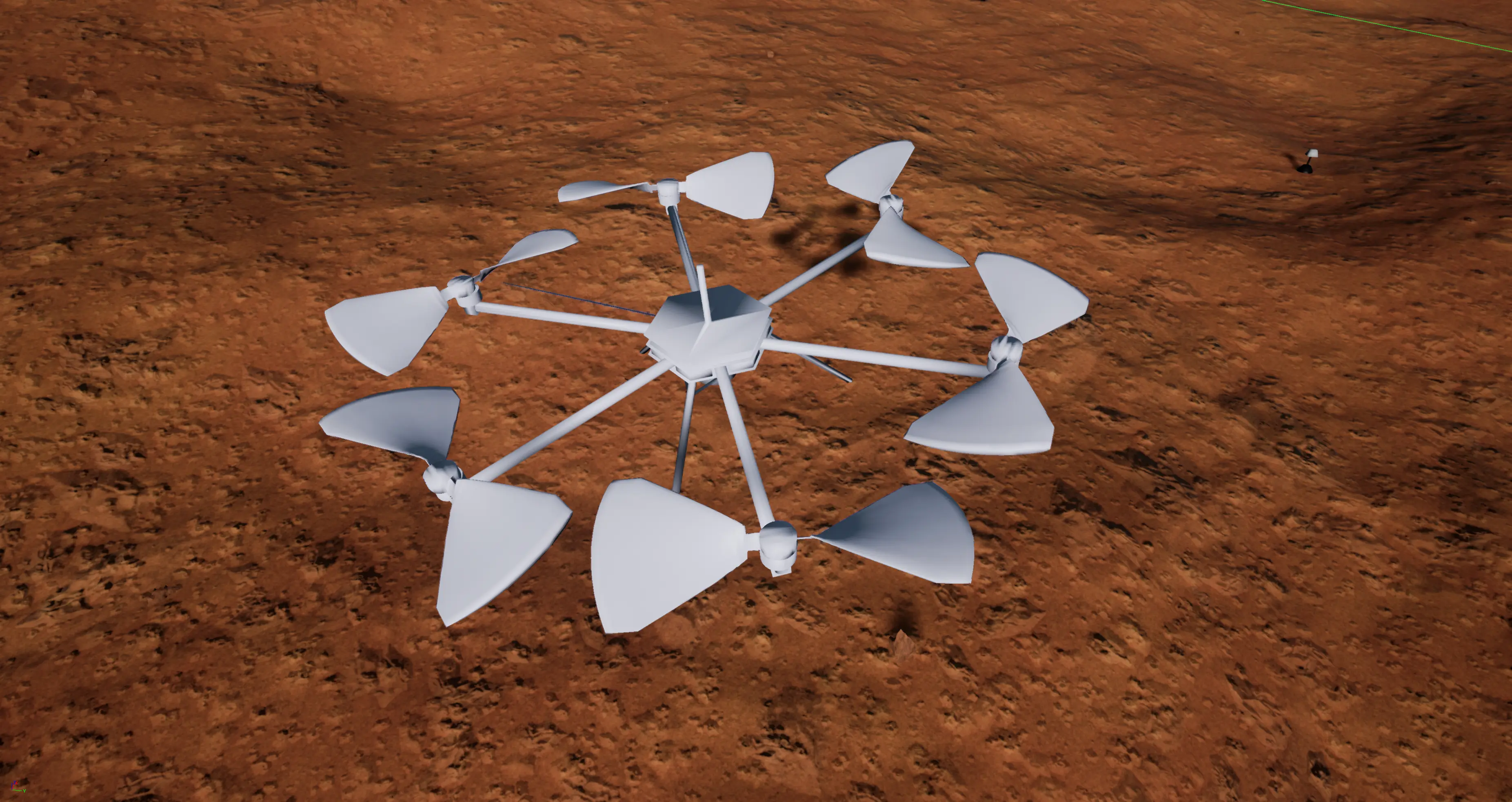
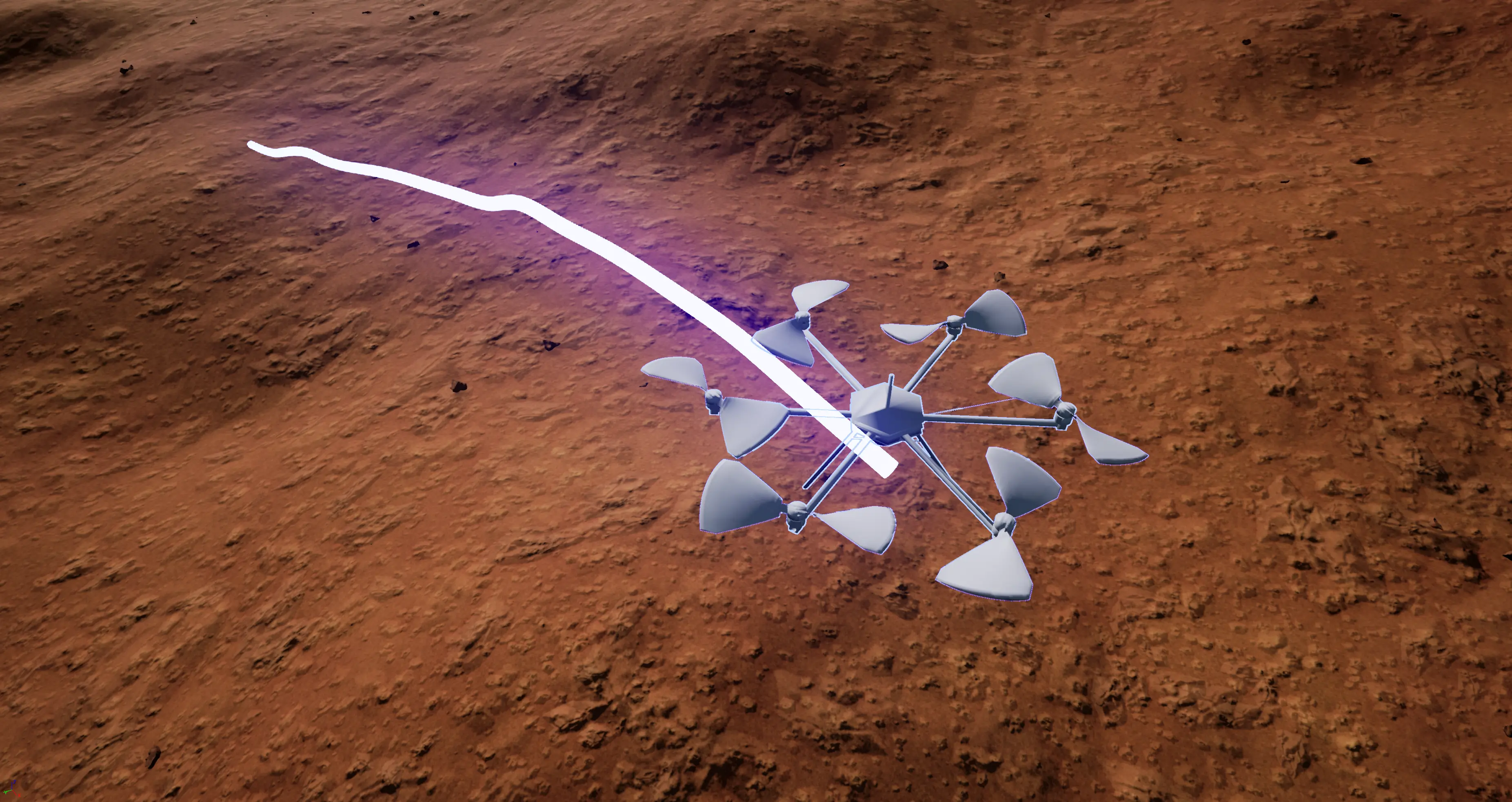
Unmanned Aerial Vehicles (UAV) Modelling
- Realistic 3D model with working wheels.
- Paths/splines to a given target point can be calculated.
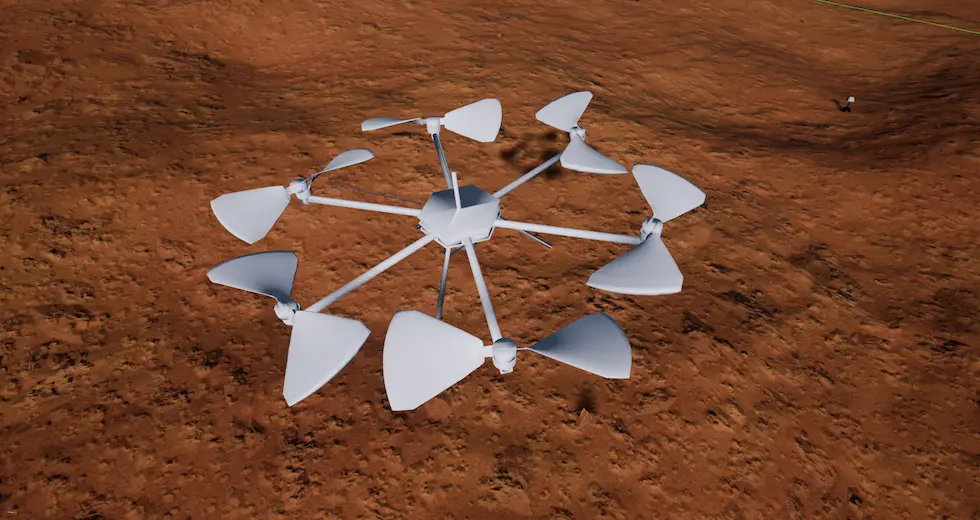
UAV (Unmanned aerial vehicle) 3D model.
-
Charlie Robots Modelling
- Skeletal model included.
- Animation is based on pre-defined motion set provided by DFKI.
- Physically based movement based on the animation.
- Follows a given spline by using the walking forward and turning animations.
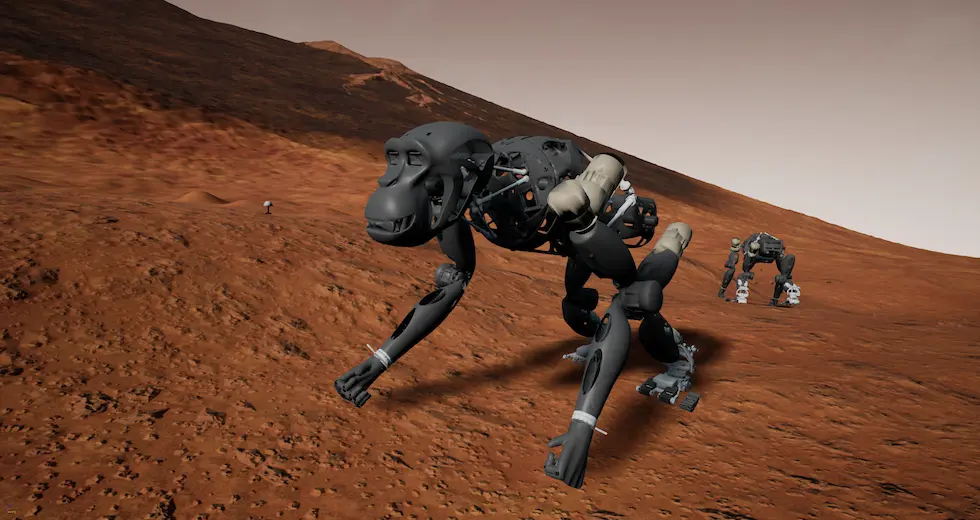
Charlie robot model.
-
Orbiters
- SPICE kernel for orbital movement is integrated as ROS node.
- Orbiters setup can be configured easily via ros launch file.
-
Environmental Process
- Environmental process data provided by DLR is processed.
-
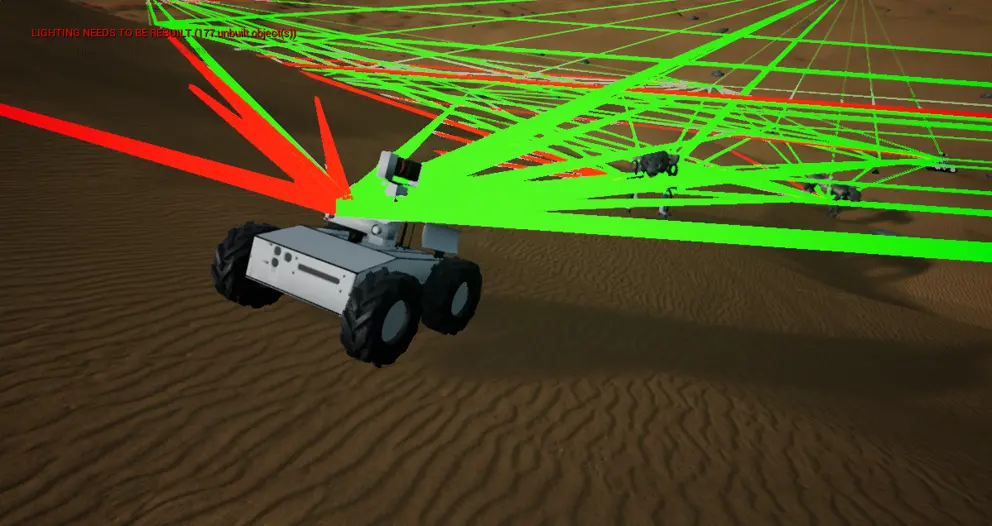
Visualization
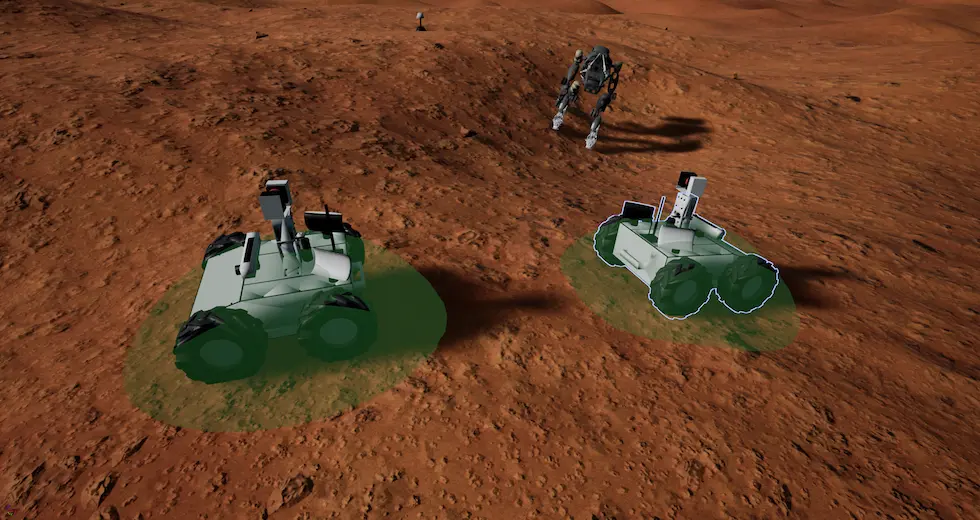
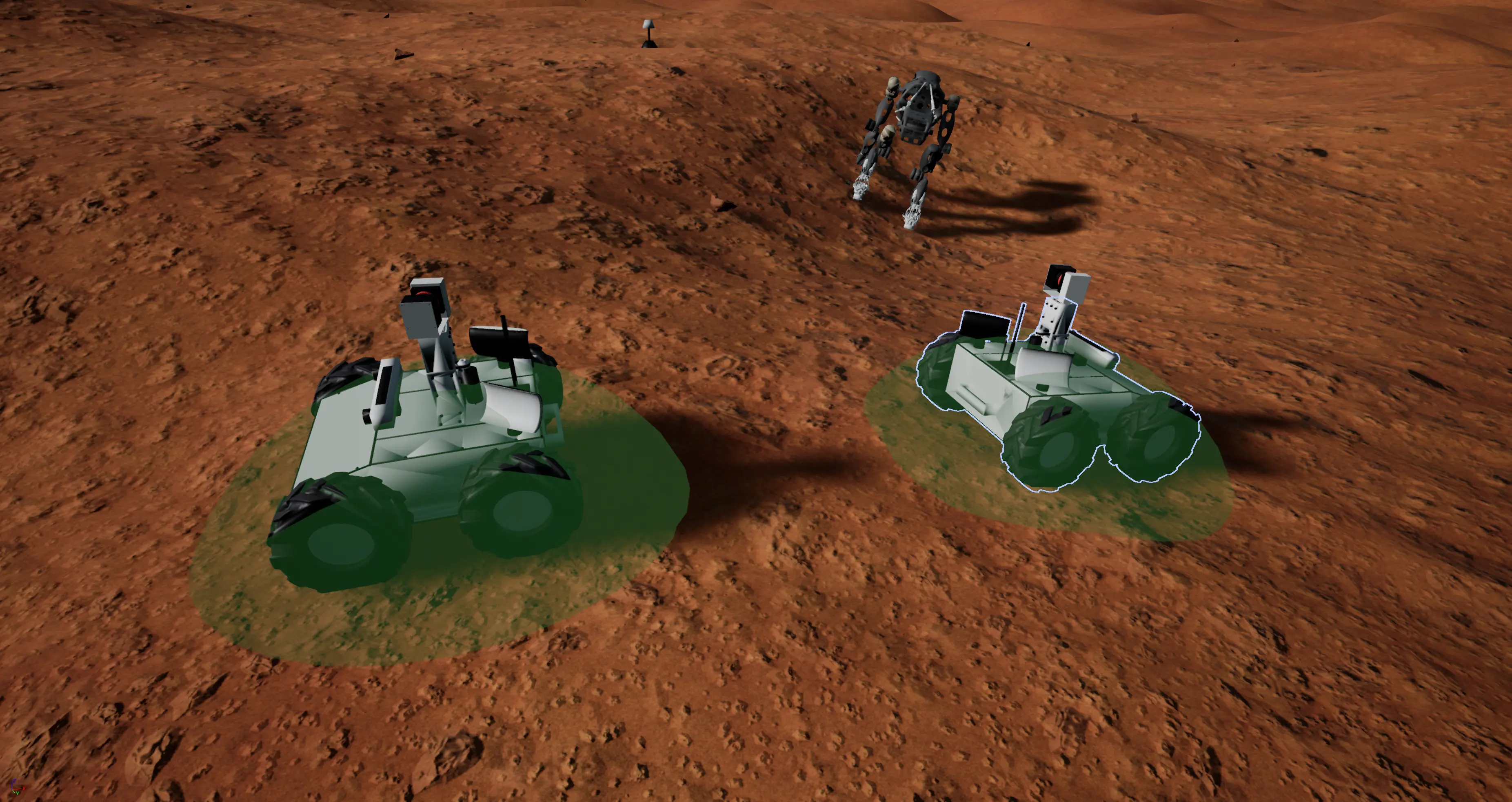
- Visualization of estimated swarm poses by LAOLa as blue ghosts.
- Visualization of line-of-sight-data for LAOLa between beacons and swarm units.
- Visualization of uncertainity ellipsoids of IMU and Odometry data can be shown.
- Visualization of point clouds computed by lidar.
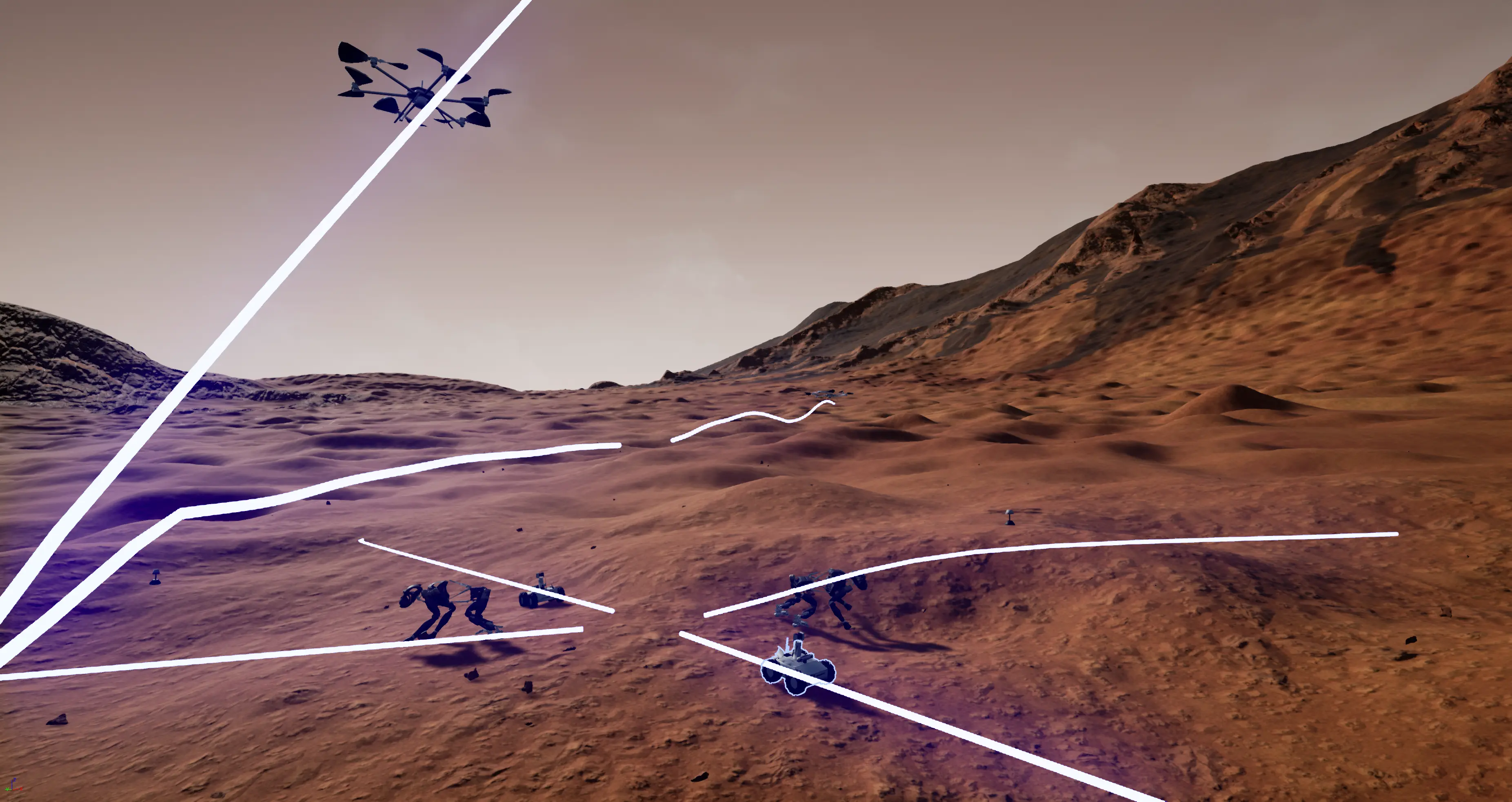
- Visualization of current planned paths.
- Visualization of orbiters.
- Visualization of the camera sensors.
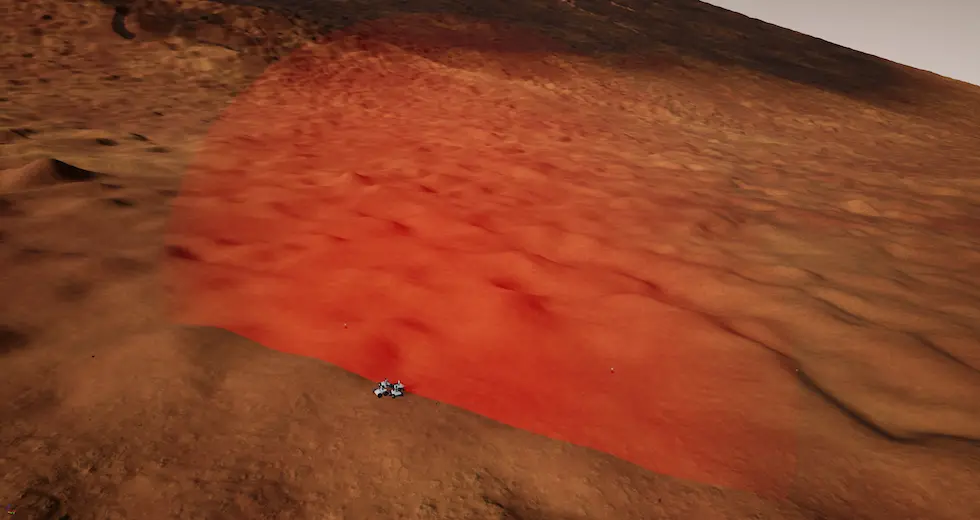
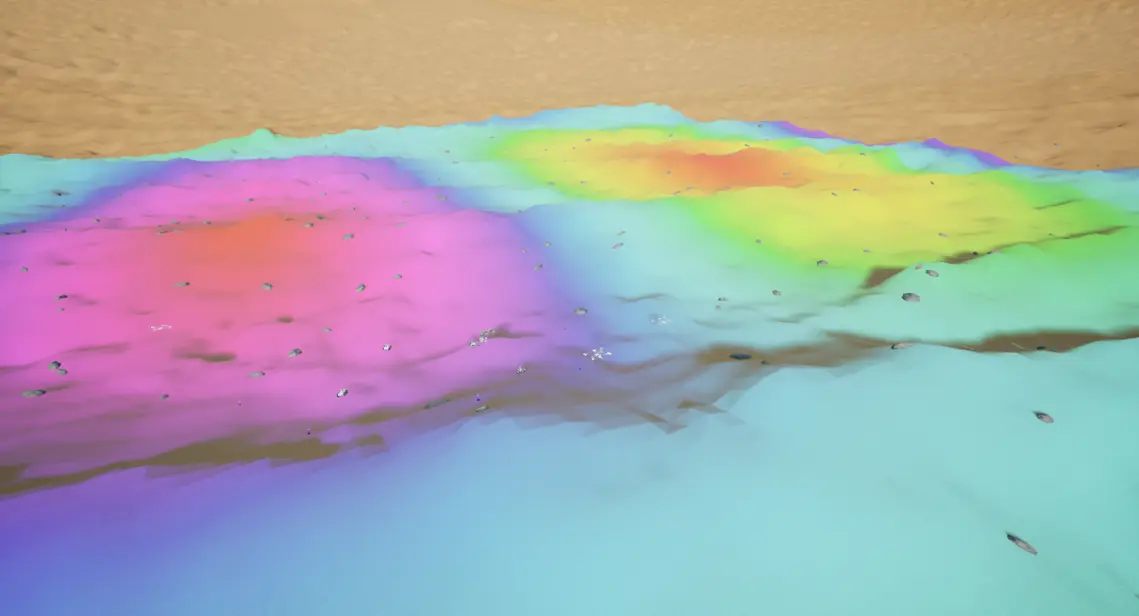
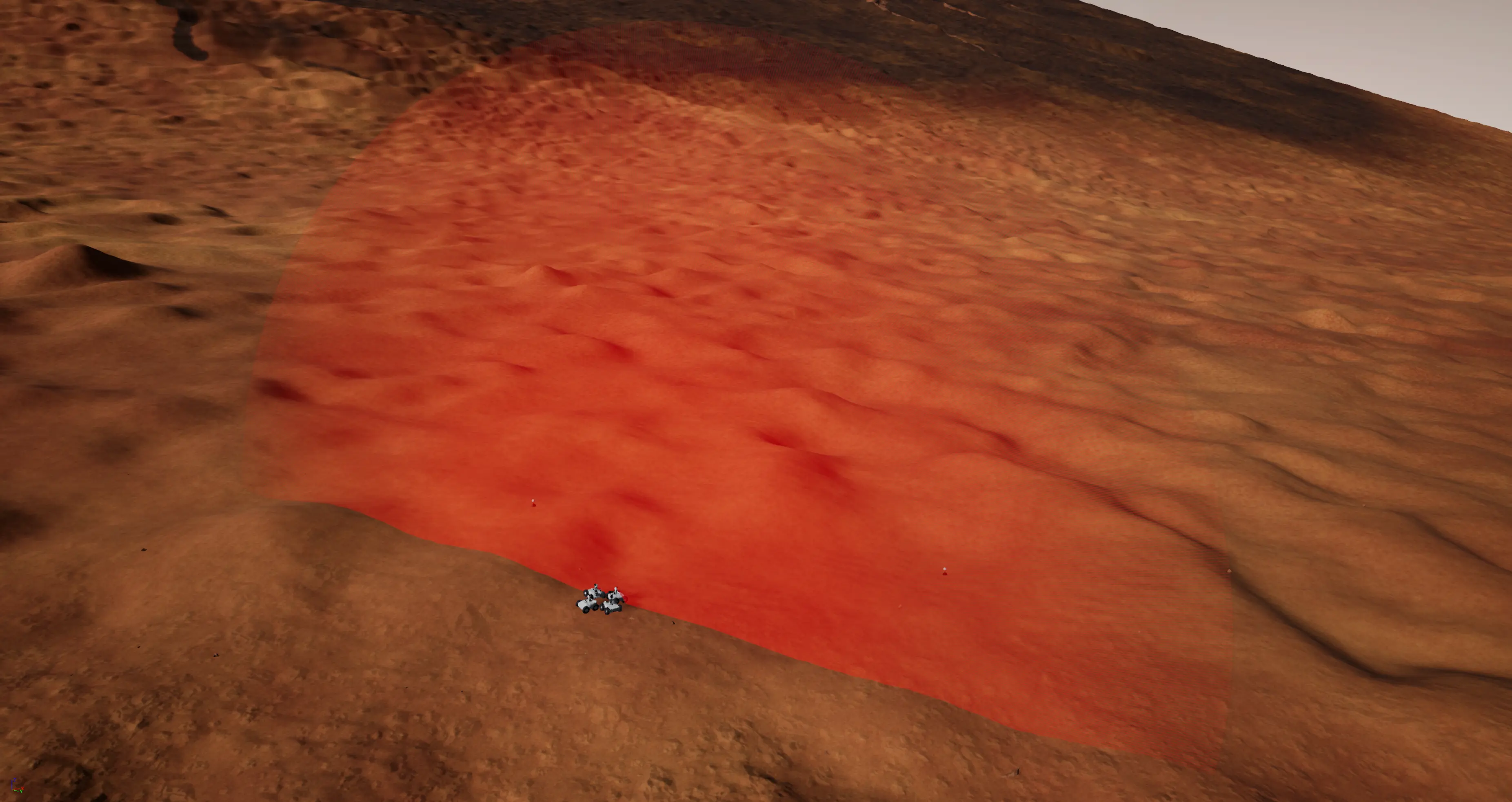
- Visualization of ground-truth and estimated environment process data as decal on terrain.
- Visualizations are invisible for the RGB(D) cameras of the swarm units.
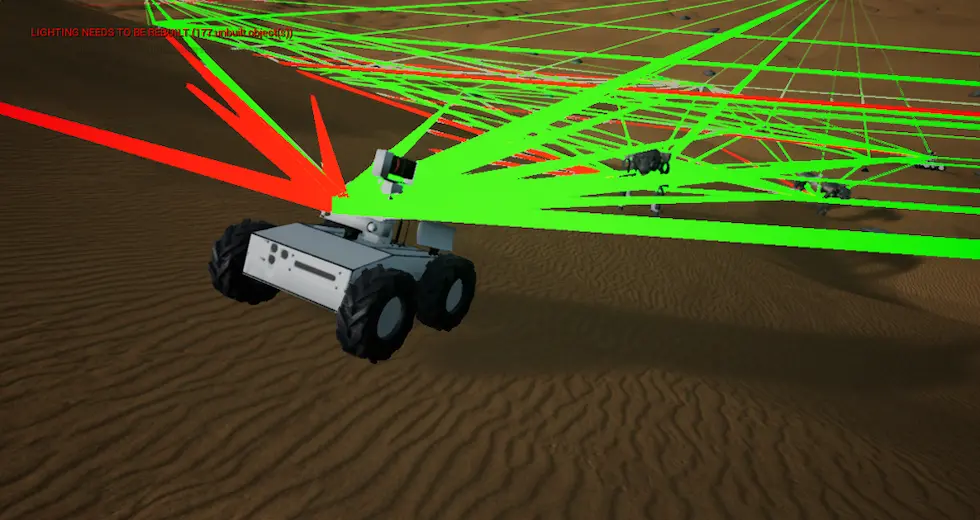
Visualization of line of sights between different swarm elements.

Visualization of orbiter.
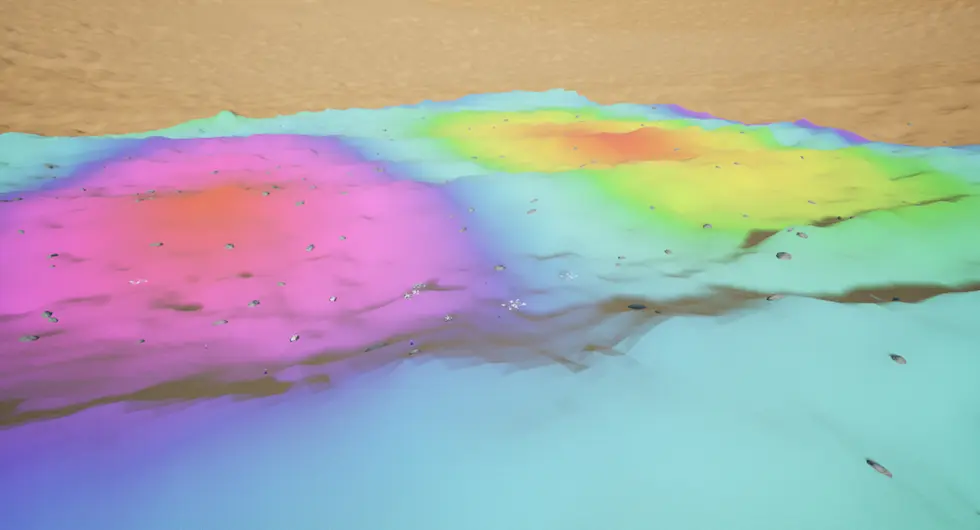
Visualization of enivronmental process data.

Visualization of planned paths of swarm units.
Visualization of a planned path of UAV (unmanned aerial vehicle) unit.
Visualization of a lidar scanning of an UGV (unmanned ground vehicle) unit.
Visualization of a lidar pose uncertianity of an UGV (unmanned ground vehicle) unit.
-
Interaction
- Swarm units are selectable via mouse cursor.
- Menu system for interaction and visualization of swarm units and other data.
- Visualizations can be toggled on or off for the selected swarm unit, all units of the selected type or globally.
-
VR Interaction
- User can teleport using the controller.
- Basic physical interaction with the swarm units with the controllers.


Videos
Other Screenshots

Different swarm units.
Publications
- Prof. Dr. Zachmann from the University of Bremen and Dr. Daniel Kühn from the "Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI)" report in an Interview with hitech-campus.de about the project „Valles Marineris Explorer – Virtual TestBed“ (VaMEx-VTB), which simulates robots on Mars.
- Poster at International Planetary Probe Workshop 2019, Oxford, England, July 8 - 12, 2019. [Paper] [Poster]
- Bremen scientists are working on virtual technologies for future missions on the red planet: Charlie auf dem Mars.
- Article in the magazine Robotik und Produktion: Roboter erobern fremde Planeten