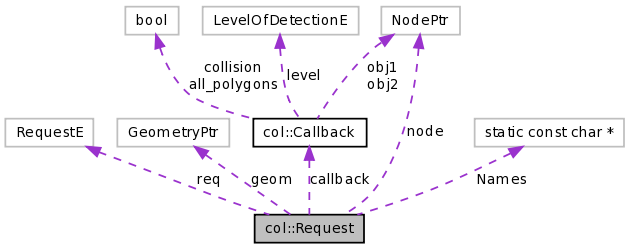
Collaboration diagram for col::Request:
Public Member Functions | |
| Request (RequestE req, Callback *callback) | |
| Create a "two objects request". | |
| Request (RequestE req, osg::NodePtr node) | |
| void | operator= (const Request &source) |
| void | process (bool show_hulls, AlgoE algo, Matrix *colmatrix, std::vector< ColObj > *colobjs, std::vector< Callback * > cycle_callbacks, bool useHulls, Grid *grid) |
| Process a request to the collision detection module. | |
| const char * | getName (void) const |
Public Attributes | |
| RequestE | req |
| osg::GeometryPtr | geom |
| osg::NodePtr | node |
| Callback * | callback |
Static Public Attributes | |
| static const char * | Names [] |
In order for the CollisionPipeline to be able to run in parallel to the main ailpcation, requests (such as "register an object") must be queued. This class aides that.
Create a "two objects request".
| inreq | the request (ADD_OBJECT,ACTIVATE_OBJECT) | |
| incallback | a collision callback |
| XCollision | If the type of request is not a two object request. | |
| XCollision | If callback seems to be improperly constructed. |
| void Request::process | ( | bool | show_hulls, | |
| AlgoE | algo, | |||
| Matrix * | collmatrix, | |||
| std::vector< ColObj > * | colobjs, | |||
| std::vector< Callback * > | cycle_callbacks, | |||
| bool | useHulls, | |||
| Grid * | grid | |||
| ) |
Process a request to the collision detection module.
show_hulls anders (z.B. als define) implementieren
const char * Request::Names [static] |
Initial value:
{
"Add object",
"Add callback",
"Remove callback",
"Activate object",
"Deactivate object",
"Add cycle callback"
}
 1.5.2
1.5.2