The Triplesim master project of CGVR and MARUM works towards creating a simulation of an underwater exploration of an icy moon in a virtual environment. This project takes place in the context of the TRIPLE project, which plans such missions in the future. A focus of this project is simulating the navigation of an autonomous underwater vehicle (AUV) in Unreal Engine 5.2. For this purpose, the simulation contains many sensors that are commonly used for navigation.
Das Masterprojekt Triplesim von CGVR und MARUM beschäftigt sich mit der Simulation einer Unterwassererkundung von Eismonden in einer virtuellen Umgebung. Dieses Projekt findet im Rahmen des TRIPLE-Projekts statt, welches solche Missionen in Zukunft plant. Ein Schwerpunkt dieses Projekts ist die Simulation der Navigation eines autonomen Unterwasserfahrzeugs (AUV) in der Unreal Engine 5.2. Zu diesem Zweck enthält die Simulation diverse Sensoren, die üblicherweise zur Navigation verwendet werden.
The TRIPLE project seeks solutions to the problem of how to conduct scientific studies of subglacial lakes on other planets. TRIPLE stands for Technologies for Rapid Ice Penetration and subglacial Lake Exploration. Since all of the potential targets are covered by layers of ice, a large part of the project is the development of a melting probe, which can melt through such. A drone will then be deployed, which will maneuver independently and collect samples. More information can be found here.
Das TRIPLE-Projekt sucht nach Möglichkeiten zur Erkundung und Erforschung von subglazialen Seen auf anderen Planeten. TRIPLE steht für "Technologies for Rapid Ice Penetration and subglacial Lake Exploration". Da alle potenziellen Ziele von Eisschichten bedeckt sind, besteht ein großer Teil des Projekts in der Entwicklung einer Sonde, welche in der Lage ist eine solche zu durchdringen. Anschließend wird eine Drohne eingesetzt, die selbstständig manövrieren und Proben sammeln soll. Weitere Informationen können hier gefunden werden.
The VaMEx project, short for Valles Marineris Explorer, searches for a swarm-based exploration approach for future mars missions. For this goal, several autonomous drone units work together in the same network, consisting of rovers, crawlers and unmanned aerial vehicles. The VaMEx-VTB is a subproject of the University of Bremen with the goal to firstly provide a test framework for swarm-based exploration systems and secondly contain tools for evaluation. To achieve this, a communication framework between Unreal Engine 5 and ROS has been implemented, which will also be used in this project. More information can be found here and here.
Das VaMEx-Projekt, kurz für Valles Marineris Explorer, sucht nach einem schwarmbasierten Explorationsansatz für zukünftige Marsmissionen. Zu diesem Zweck arbeiten mehrere autonome Drohneneinheiten im selben Netzwerk zusammen, bestehend aus Rovern, Crawlern und unbemannten Luftfahrzeugen. Das VaMEx-VTB ist ein Teilprojekt der Universität Bremen mit dem Ziel, erstens ein Testframework für schwarmbasierte Explorationssysteme bereitzustellen und zweitens Werkzeuge zur Evaluation dieser zu enthalten. Um dies zu erreichen, wurde ein Kommunikationsframework zwischen Unreal Engine 5 und ROS implementiert, welches auch in diesem Projekt zum Einsatz kommt. Weitere Informationen können hier gefunden werden.

Although little is known about the expected environment, the presence of hydrothermal vents would be an interesting target for investigation. There are several such structures at the bottom of the lake that constantly emit particles into the surrounding area. The distribution of these particles can be observed in the simulation.
Obwohl wenig über die erwartete Umgebung bekannt ist, wäre das Vorhandensein hydrothermaler Quellen ein interessantes Ziel für Untersuchungen. Am Grund des Sees befinden sich mehrere solcher Strukturen, die ständig Partikel in die Umgebung abgeben. Die Verteilung dieser Partikel kann in der Simulation beobachtet werden.
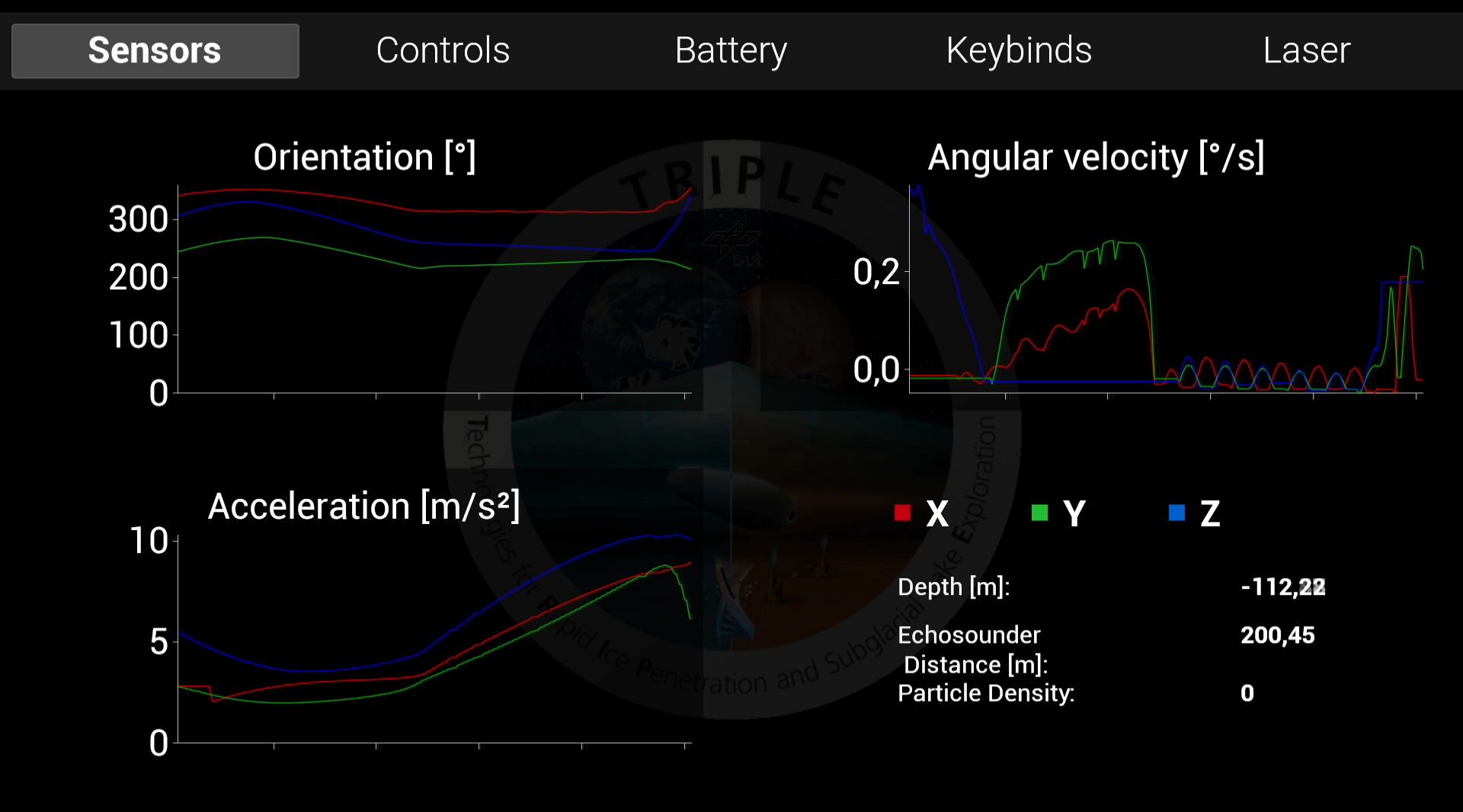
Relevant application data is displayed in a separate window. This window contains both values corresponding to the AUV's current position as well as ways to interact with the system, such as configuring vehicle light settings. Many values that are output to the ROS system can be viewed in this interface aswell.
Relevante Anwendungsdaten werden in einem separaten Fenster angezeigt. Dieses Fenster enthält sowohl Werte, die der aktuellen Position des AUV entsprechen, als auch Möglichkeiten zur Interaktion mit dem System, wie zum Beispiel die Konfiguration der Fahrzeuglichteinstellungen. Viele Werte, die an das ROS-System ausgegeben werden, sind auch in dieser Schnittstelle verfügbar.
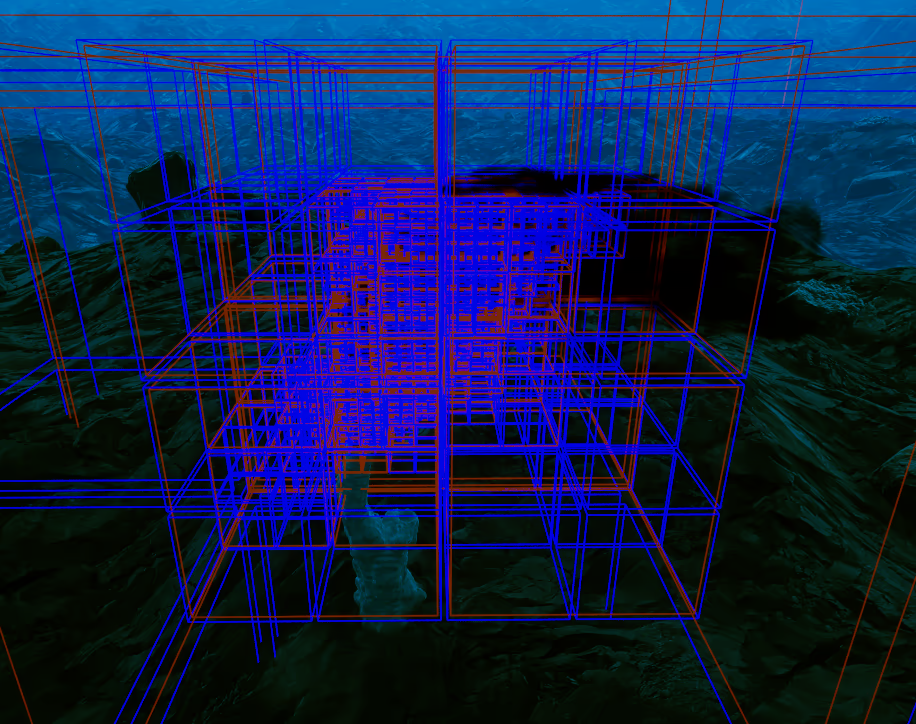
The AUV must be able to move without manual input. To do this, the AUV has various sensors, one of which is the USBL. The AUV communicates with the base station via sound. The position of the AUV can be determined via the hydrophones of the respective transceiver and the time of flight of the sound. We use several rays, bundled as a cone, to simulate these echo waves. The AUV and the base station have 5 hydrophones that are simulated via bounding boxes. When some of the rays enter these bounding boxes, the tranceiver calculates the estimated position based on the calculated direction and flight time.
Das AUV muss sich ohne manuelle Eingabe bewegen können. Dazu verfügt das AUV über verschiedene Sensoren, einer davon ist der USBL. Das AUV kommuniziert per Ton mit der Basisstation. Die Position des AUV kann über die Hydrophone des jeweiligen Transceivers und die Laufzeit des Schalls bestimmt werden. Um diese Echowellen zu simulieren, nutzen wir mehrere zu einem Kegel gebündelte Strahlen. Das AUV und die Basisstation verfügen über 5 Hydrophone, die über Bounding Boxes simuliert werden. Wenn einige der Strahlen in diesen Begrenzungsrahmen eindringen, berechnet der Transceiver die geschätzte Position basierend auf der berechneten Richtung und Flugzeit.
The ocean current map uses the octree data structure to represent the current velocities that act as external disturbances on the AUV. Currently the only sources of these currents are a constant value for the complete level and the hydrothermal vents. They are pre-computed and saved to disk to avoid performance impacts.
Die Meeresströmungskarte benutzt einen Octree als Datenstructure um die Strömungsgeschwindigkeiten die auf AUV wirken zu speichern. Aktuell sind die einzigen Quellen ein konstanter Wert für das gesamte Level und die hydrothermale Quellen. Diese sind vor-berechnet und auf der Festplatte gespeichert um negative Auswirkungen auf die Leistung zu haben.