Overview
The Virtual Cooking project has been in existence since 2019 and aims to teach robots to grasp
like humans so they can assist in cooking.
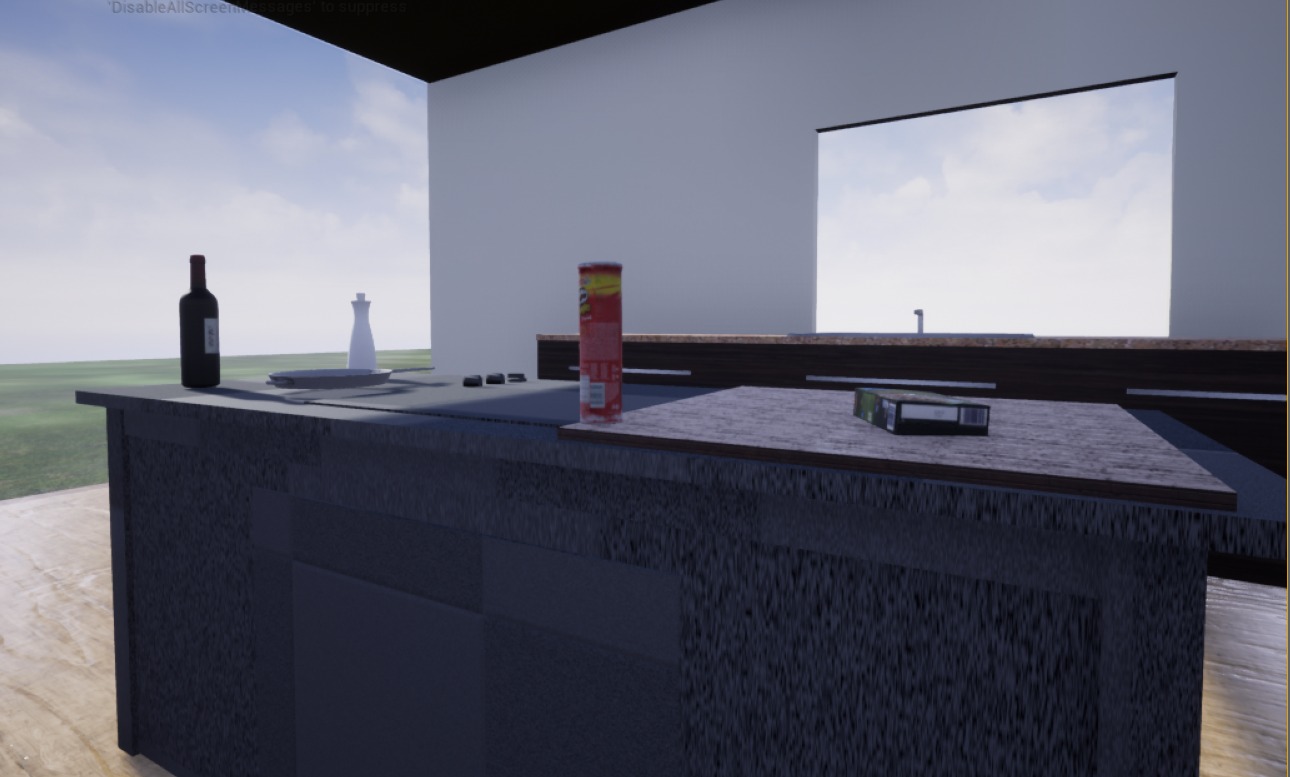
The work of this project focuses on adding new objects to a virtual kitchen environment and
analyzing different grasp types in it,
considering where the objects were picked and how much force was applied. The way of grasping in
the virtual environment will also be
compared to how grasping works in real life.
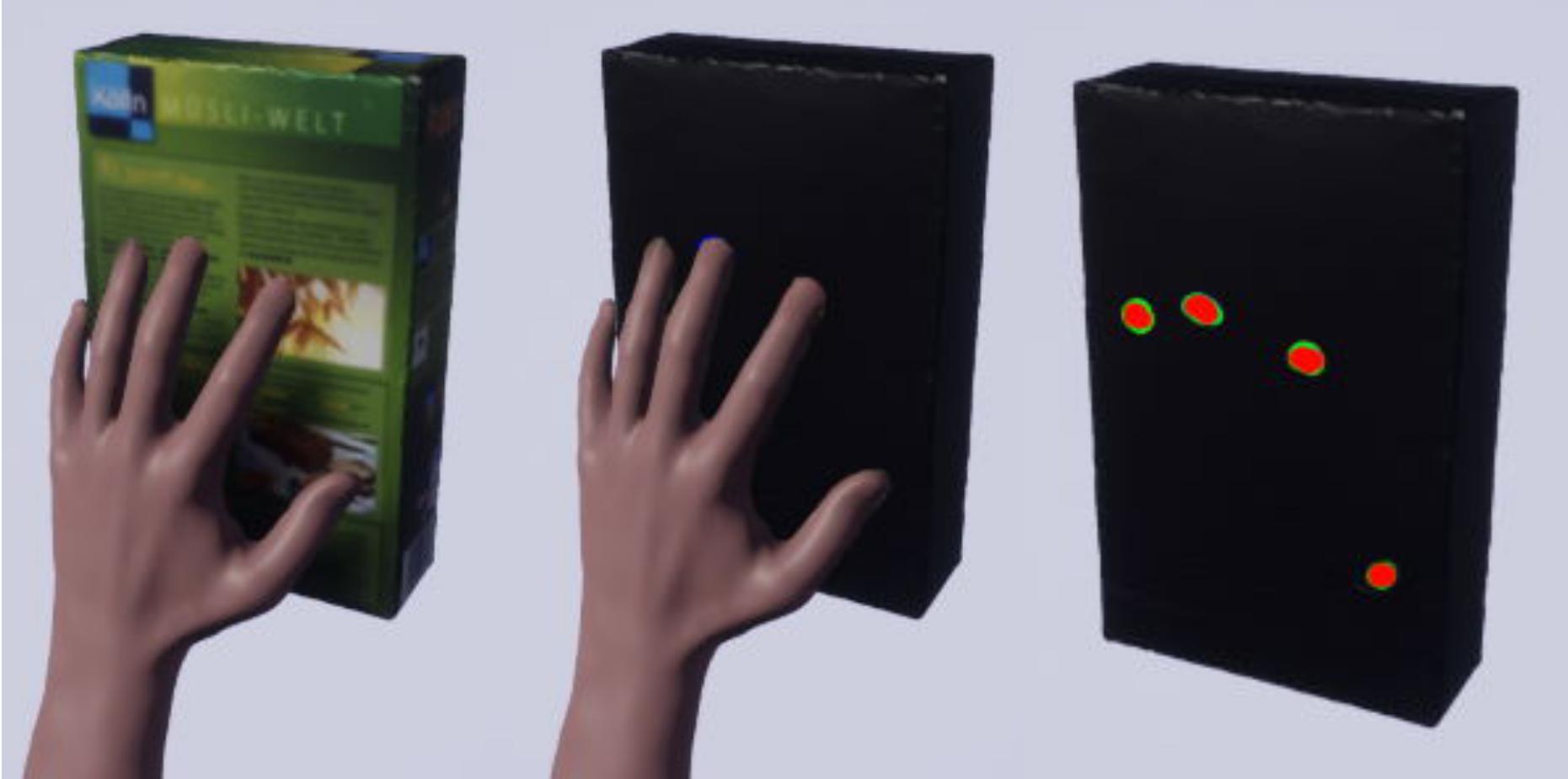
We use Cybergloves and the OptiTrack tracking system
to record human grasping movements in virtual reality. To display the collision between the data
gloves and the objects,
heat maps are generated and stored in a database.
In general, we use the Unreal
Engine for 3D representation and
Meshroom for 3D modelling
of the objects.